
门型运动与节拍优化
2024-08-13
概述
在机器人的应用场景中,搬运任务十分常见。在搬运过程中,为了避免出现产品、货物受到摩擦、碰撞的情况,门型运动因此形成。这种运动方式以其高速跨障取放料的特性,广泛应用于3C行业和码垛行业。
在机器人领域中,节拍是指机器人完成一项工件规定的处理作业内容所要求的时间,节拍的优化意味着机器人生产效率的提升。
门型运动的主要步骤包括垂直抬起、跨越障碍、垂直下降,纳博特通过对轨迹融合技术的强化应用,来完成运动节拍的优化。
门型运动指令
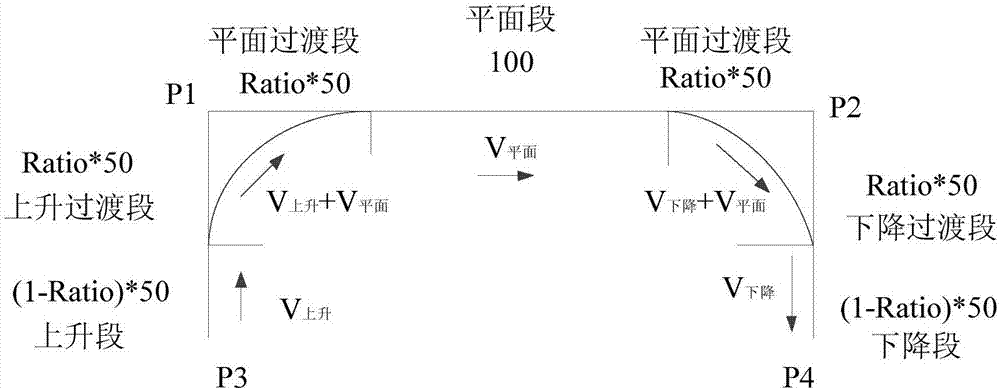
门型运动示意图如下所示:

在纳博特运控中,门型运动指令是MOVARCH,说明如下:
MOVARCH 门型
1.指令参数
ARCH点位、速度、平滑率、加减速、位移轴、位移距离、直线距离、提前执行时间。
门型轨迹由以下参数计算确定:
a. ARCH点位:门型运动中的关键点位置,如目标点;
b. 速度:门型运动中机器人的运动速度;
c. 平滑率:门型指令中本段指令与下一段指令的平滑过渡等级;
d. 加减速:运动中的加速度比率/减速度比率;
e. 位移轴:仅能够以X、Y、Z中某一轴方向上升(一般为Z轴);
f. 位移距离:需要在位移轴上位移的距离;
g. 直线距离:运动到目标点的垂直下降距离;
h. 提前执行时间:执行下一条指令的提前时间。
在纳博特运控中,新建一个工程文件,然后点击打开->插->运动控制类->门型运动,即可进行门型指令的相关配置,如下图:
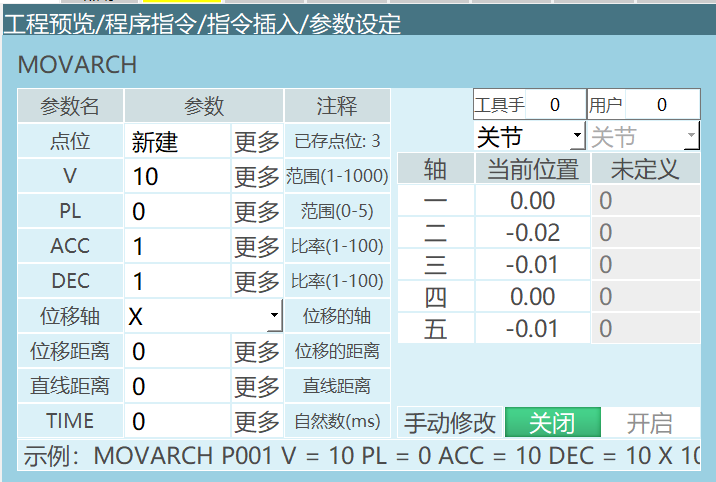
2.界面说明
● V:运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。
● PL:平滑过渡等级,范围0-5。
● ACC:加速度比率,范围1-100,单位为百分比。
● DEC:减速度比率,范围1-100,单位为百分比。
● 位移轴:(X、Y、Z)门型运动时进行位移的轴,标准门型运动位移的是Z轴方向。
● 位移距离:需要在位移轴上位移的距离,标准门型运动是在Z轴上位移25mm。
● 直线距离:在位移轴上沿直线段到目标点的垂直下降距离。
● TIME:时间,范围非负整数,单位ms。提前时间执行下一条指令。
注意,当修改直线指令的速度时,加减速度以及加减速度会与速度成1:10的倍数关系自动显示,如需修改加减速度以及加减速度,可手动操作。 纳博特门型支持单步和试运行。
3.使用范例
MOVARCH P0001 V=100mm/s PL=5 ACC=10 DEC=10 Z 25 0 该指令表示,机器人进行门型运动时,从当前起始点到P0001目标点,速度为100mm/s,平滑等级5,加速度10%,减速度10%,门型高度为目标点沿Z轴上位移25mm,直线距离为0。
优化阻碍
● 转弯区机制:机器人在前后两个路径之间需要进行方向变化时,由于惯性影响,通常需要通过转弯区进行过渡。不同品牌的机器人转弯区机制可能不同,这会影响其实际运行轨迹和节拍。
● 电气响应时间:电气系统的响应时间也是影响节拍的重要因素。如果电气系统响应速度慢,将导致机器人在执行IO信号时产生延迟,从而影响节拍。
● 路径规划不合理:如果机器人在门型运动中的路径规划不够优化,比如存在过多的急转弯或不必要的停顿,都会导致节拍提升不上去。
● 算法效率:控制算法的效率也是影响节拍的关键因素。如果算法计算复杂度高、处理速度慢,将无法满足高速运动的需求。
改进提升
为提升门型运动节拍,纳博特采用独创的轨迹融合技术对原标准门型轨迹进行改进,以下是效率提升点:
- 通过垂直上升与水平运动的融合、水平运动与垂直下降的融合,在不影响跨障的同时,实现了垂直段与水平段轨迹的高速过渡,提高效率。
- 水平运动主要目的是接近目标位置,运动方式不影响作业目的,所以采用更效率、更舒适的关节运动,同时可以避免潜在的奇异点以及多解等问题。
- 加入电流反馈控制算法,优化轨迹插补算法,支持机器人在确保平稳运行的前提下以更大的加速度运行轨迹。
- 优化轨迹平滑算法,支持机器人在平滑过程中也可以平稳运行并且达到更大的速度和加速度,减少非必要的停顿和急转弯。 值得一提的是,纳博特运控中,门型指令参数的PL并非是门型运动中拱形段的弧度表示,而是经过轨迹融合,表达为当前运动指令与后一段运动指令过渡的平滑度,经纳博特开发部门测试,现有轨迹融合方法过渡转弯比使用一般平滑过渡方法效率提升50%,充分体现了纳博特轨迹融合技术的优势所在。 轨迹融合的简要示意图如下:
优化效果
为了验证优化效果,纳博特测试部门对强化应用后的门型指令进行了具体的测试,实验室测试如下: ● 测试环境:四轴SCARA机器人,详细参数如下表格:
| 参数 | 值 |
|---|---|
| 关节转速 | 5000 |
| 指令速度 | 5000 |
| 平滑 | 5 |
| 全局速度 | 100% |
| 加速度倍数 | 15 |
| 减速度倍数 | 15 |
| 最小加速度时间 | 0.02 |
● 测试结果:在关节转速为5000转的情况下,长期运行无异常,并且节拍稳定在0.3s附近,极限节拍速度优化到了0.21s,大大提高了机器人的工作效率。相较于市面上其他机器人的使用结果,纳博特的节拍时间缩短了30%。
未来展望
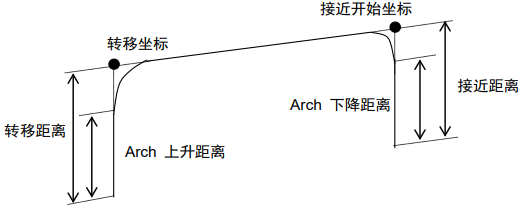
通过上面的描述,纳博特的门型运动指令已展现出应用的稳定性,目前已经能够满足广大客户的多样化需求。展望未来,纳博特运动控制中会加入更多扩展指令功能,旨在进一步提升客户的码垛体验。 比如说MOVARCH指令中,计划修改后参数变成:Arch 点位、速度、平滑、加减速、上升方向、参数表[0~7]、方向轴最大坐标、提前执行时间。这样修改后,指令的易用性得到了提升。 下面以计划增加的扩展门型指令MOVARCHEXT为进行详细介绍: MOVARCHEXT 扩展门型 指令参数:ARCHEXT 目标点,转移点,接近点,速度,平滑,加减速,参数表[0~7],提前执行时间。 门控参数设置 参数表[0~6]共7个,用于指定门控运动的转移距离与接近距离(见下图),下表是默认参数。参数表7默认进行标准门型运动,不做轨迹融合。
| 序号 | 转移距离 | 接近距离 |
|---|---|---|
| 0 | 30 | 30 |
| 1 | 40 | 40 |
| 2 | 50 | 50 |
| 3 | 60 | 60 |
| 4 | 70 | 70 |
| 5 | 80 | 80 |
| 6 | 90 | 90 |
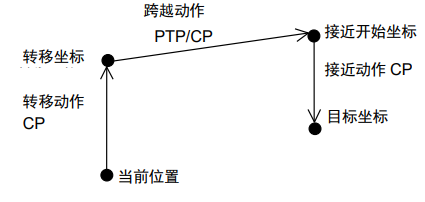
门型轨迹由示教点确定(与下面图示配合使用更佳): a. 当前位置:开始运动时的机器人位置。 b. 转移坐标:是从当前位置向工具坐标 Z 方向进行移动后的位置。 c. 接近开始坐标:是从转移坐标进行跨越动作后所到达的位置。 d. 目标坐标:门型指令中的终点位置。 e. 转移距离:当前位置(出发点)的垂直上升距离。 f. 接近距离。目标点的垂直下降距离。
以下图示中,图4为场景抽象概念图,图5为运动轨迹示意图:
MOVARCHEXT扩展指令的加入,将为客户带来使用体验上的优化,同时优化机器人的运动效率。 我们坚定不移的认为,通过不断的技术创新,方能推动智能制造的持续发展。以工业4.0纲领为大方向,纳博特在引领国产机器人革新的道路上毅然前行。前行之路,纳博特永不止步。