
X01协作控制柜
产品简介
星辰辉耀,卓尔不凡,X01-星辰一号协作机器人控制柜,采用自主研发的控制算法和动力学算法,带有基于动力学的拖拽示教、碰撞检测和动力学前馈功能,可以平滑、柔顺的进行拖拽示教并可以记录、回放轨迹。
体积小巧,集成度高。其便携性远在同类产品之上;即插即用,简化了安装与部署流程,用户无需繁琐的配置或调试过程,只需简单几步连接即可,方便快捷。
基于Intel边缘控制平台(ECI),能够同时满足工业级应用对实时计算和高水平运营可用性的要求,实时计算能力强。轻松实现密集环境中时间的确定性计算,拥有极高的可靠性与稳定性。
产品优势
动力学技术
纳博特科技的带载动力学技术无需传感器,即可提高机器人在带有负载的情况下的拖拽顺滑度,与发生碰撞时的碰撞检测灵敏度。在力学前馈的加持下可以明显抑制大负载机器人在运行过程中的抖动,以及带有负载的情况下运行过程中的抖动。
纳博特科技的动力学辨识过程是全自动的,在通过测试轨迹的安全性后,即可通过机器人自动运行预设轨迹来辨识出动力学参数,无需人工计算。
拖动示教和轨迹回放
支持动力学的拖动示教,可以记录轨迹和回放。
产品参数
| 产品 | 参数 |
|---|---|
| CPU | Intel® Celeron J6412, 2.6 GHz |
| 内存 | 4G |
| 电源输入 | 220V 10A |
| 电源输出 | 48V |
| 功耗 | 1500W/3000W(可选) |
| 系统 | Linux RT |
| 网口 | 1*EtherCAT, 3*Ethernet |
| USB | 2*USB 3.0 |
| COM | 1*RS232, 1*RS485, 带隔离 |
| I/O | 16*隔离 DI,16*隔离 DO,2AI(0-10V),2AO(0-10V) |
| CAN | 2*CAN |
| 指示灯 | 1 x PowerLED,1 x HDDLED、1 x RUNLED、1 x ERR LED |
| 显示 | 1 x HDMI,resolution to 4096x2160@30Hz |
| 安装方式 | Desk-Mount(桌面式) |
| 尺寸 | , 307mmx297.20mmx96.20mm |
| 编码器 | A、B 相差分输入, 5V 供电输出;32 位有符号计数, 2 路 |
| PWM | 2 路输出, 单端, 占空比 0-100%可调;电压 5V 或 24V, 频率 1MHz 以内 |
| WIFI | (选配)2.4G wifi模块 |
| 示教器 | (选配)T30 -X 协作机器人专用示教器: 8 寸 TFT 全触屏,Linux+QT |
| 通讯协议 | EtherCAT、Profinet、Ethernet/IP、CAN、OPC-UA、FinsTCP、TCP/IP、ModbusTCP、ModbusRTU |
| 操作模式 | 示教模式、再现模式、远程模式 |
| 编程方式 | 示教编程、离线编程、拖动示教 |
| 坐标系统 | 关节坐标系、机器人坐标系、工具坐标系、用户坐标系 |
| 结构算法 | 5/6/7 轴协作机器人 |
| 应用 | 弧焊、氩弧焊、激光焊、电阻焊(点焊)、冲压、上下料、激光切割、喷涂、点胶、码垛、传送带跟踪等 |
| 操作温度 | 0℃ ~ 50℃(SSD) |
| 存储温度 | -40~85℃ |
| 湿度 | 5% ~ 95%, 非凝结状态Non-condensing |
| 振动 | SSD: 5~500Hz, 1.5Grms operation |
| 机械冲击 | Operation:10G@11ms Non-operation: 30G@11ms |
| 净重 | 6.92Kg |
产品接口图示

预览
| 序号 | 内容 |
|---|---|
| 1 | 电源输入接口 |
| 2 | 机器人航插 |
| 3 | DIO |
| 4 | 串口、编码器、PWM、模拟量、CAN |
| 5 | 示教器接口 |
| 6 | HDMI |
| 7 | 以太网接口 |
| 8 | USB |
| 9 | 状态指示灯 |
尺寸图
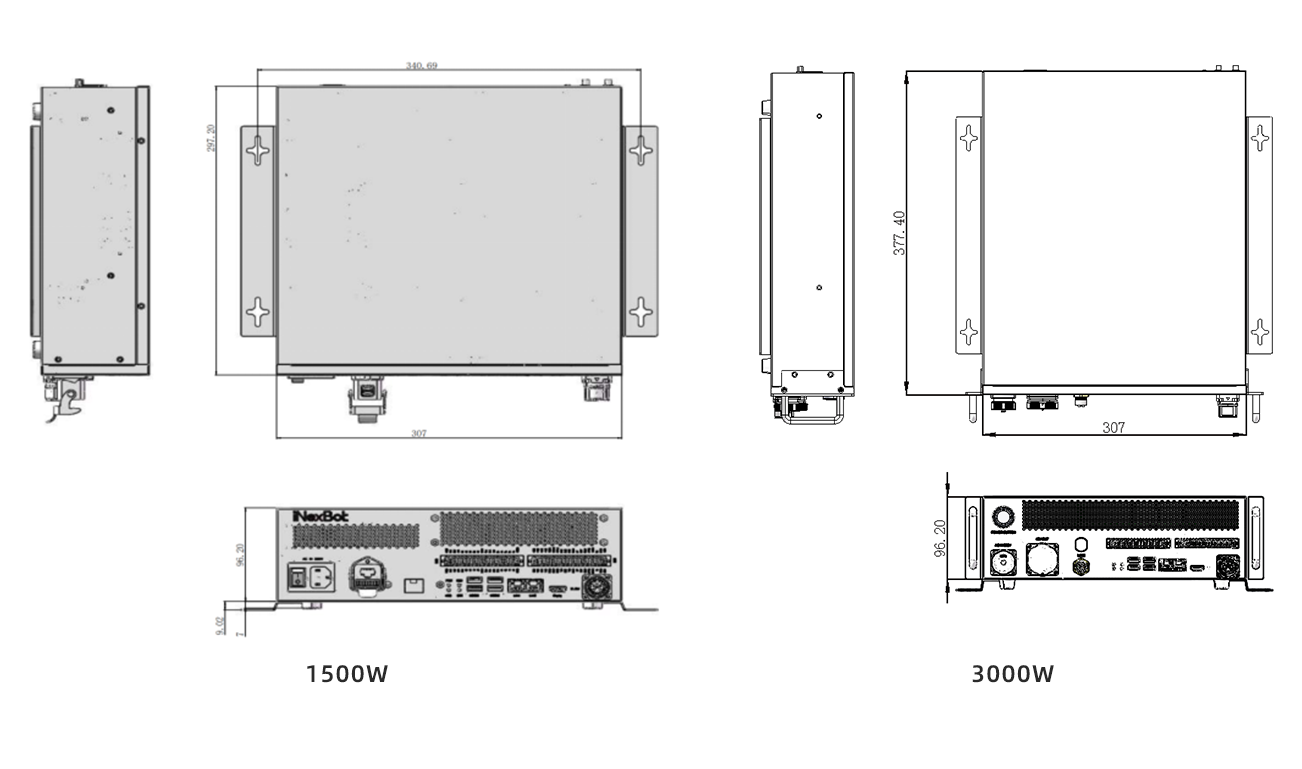
预览
尺寸图
资料下载链接
点击此处开始下载资料链接

如果本文有错误请向我们反馈,我们很珍惜您的意见或建议。