
码垛行业解决方案
码垛是将物品整齐的堆放在一起,便于运输和安装,适用于各个行业:印刷、速冻、食品等。随着工业水平的不断提高,生产过程的流水线操作,码垛工艺在生产中被了广泛运用,提高了物料的搬运能力,大大节省了人力,也节约了作业时间。
纳博特控制系统的码垛工艺区别于传统码垛工艺的局限性,功能更加开放,灵活性更高。
功能更加全面
- 纳博特控制系统是同时支持简易码垛&完整码垛两种类型 简易码垛:仅需设置两步即可,针对用户需求简单 完整码垛:功能较多,可适用于复杂环境
- 纳博特控制系统码垛工艺里有一个特色功能点:拖拽设置,用户可手动拖动屏幕上工件,进行位置的挪动。
 预览拖拽设置垛型
预览拖拽设置垛型 - 传统码跺支持的抓手类型单一,个数唯一,但纳博特控制系统的码垛工艺支持四个抓手,用户可以根据需求切换抓手类型或者同时使用多个抓手,抓取的工件数更多,这样更加节省时间,提高效率。
操作简单
- 传统码垛工艺设置流程复杂,纳博特控制系统的码垛工艺设置采用了流程图的形式,步骤清晰简洁
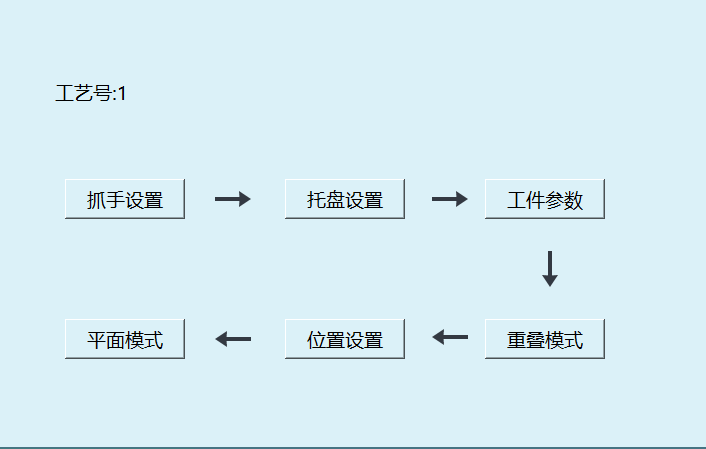 预览流程化设置
预览流程化设置 - 传统码垛操作复杂:简单的码垛过程也需要用户花费大量的时间对流程进行编程,针对这一痛点,纳博特控制系统做了特色功能:生成文件,用户仅需要做基础的设置,便可以自动生成一个具有完整流程的码垛或卸垛的作业文件。
使用灵活
- 传统码垛:用户在编完程序后,无法查看垛堆中具体某个垛堆的位置,针对这一缺憾,纳博特控制系统做了特色功能:位置调试,用户可在该页面,查看垛堆的具体位置,选中可将机器人移至到该点
 预览直观查看垛型
预览直观查看垛型 - 纳博特控制系统针对码垛入口点这一方面特意做了优化,在码垛入口点指令里,增加了入口点的位置 XYZ 优化和抓手姿态的优化,抓手姿态的优化提供了两种方式;自动计算姿态&辅助点姿态同步,大大节约了不必要的时间
 预览优化
预览优化 - 纳博特控制系统支持传送带&视觉&码垛相结合
 预览传送带/视觉/码垛
预览传送带/视觉/码垛
节拍更快,动作更加流畅,效率更高
在搬运较轻较小的物件时,纳博特控制系统的节拍是 700 包/h-800 包/h;在搬运较重较大的物件时,例如化肥包、饲料包这种重大物件,.纳博特控制系统的节拍是 500 包/h-550 包/h,远远高于传统码垛,在行业内也处于前端位置。
视频演示
典型案例
客户现场:一条产线里,需要有两个垛堆。技术难点:1.需要机器人进行左右两个垛堆交换抓取;2.客户需要强制码哪一个垛堆。
客户现场:两条产线两个垛堆。技术难点:1.左产线,需要机器人抓取至左垛堆,右产线,需要机器人抓取至右垛堆;2.当出现两条产线都同时来料时,机器人会补全上一个垛堆。
解决方案PDF下载
资料下载链接
点击此处开始下载资料链接



如果本文有错误请向我们反馈,我们很珍惜您的意见或建议。