Calibration Series_12/15-Point Calibration
2022-05-23
The 12-point/15-point/20-point calibration share the same calibration interface, and calibrating the first 12 points means using the 12-point calibration method.
For a 15-point calibration, it is necessary to perform a fresh calibration and not rely on the results obtained from a 12-point calibration. The 12-point calibration only provides the tool's XYZ axis offset and does not provide any values for rotation around the ABC axes.
Both the 12-point and 15-point calibrations have the function of correcting the zero point
After the calibration calculation is completed, moving the robot to the first position will result in deviation because this calibration method has the function of correcting the zero point
Click the "20-point calibration" button at the bottom of the "Tool hand calibration" interface to enter the calibration interface, as shown in the figure.
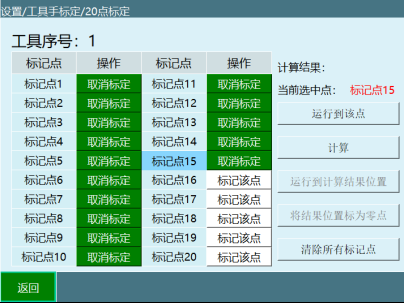
The specific calibration steps are as follows:
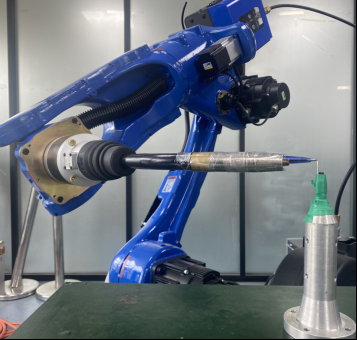
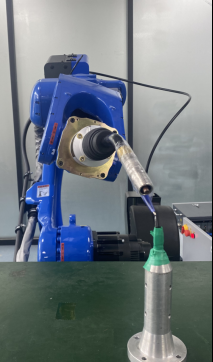
- Find a reference point (the tip of the calibration cone is the reference point) and ensure that this reference point is fixed.
- Start inserting position points, click "Mark this point" after inserting each point, and insert fifteen points.
The specific steps are as follows.
P1
The robot returns to the zero point, align the robot's end with the tip of the calibration cone through the Cartesian coordinate system, and calibrate the first point

P2
On the basis of the first point, the robot rotates 180 degrees around the C-axis through the Cartesian coordinate system, align the robot's end with the tip of the calibration cone, and calibrate the second point

P3
The robot returns to the zero point, align the robot's end with the tip of the calibration cone through the Cartesian coordinate system, and calibrate the third point (same as the first point)

P4
On the basis of the third point, perform B- movement through the Cartesian coordinate system with rotation angle between 30°and 60°, align the robot's end with the tip of the calibration cone, and calibrate the fourth point

P5
On the basis of the fourth point, perform B+ movement through the Cartesian coordinate system, make J5>-90°, align the robot's end with the tip of the calibration cone, and calibrate the fifth point

P6
Select the first point and move the robot to the first point, and on the basis of the first point, perform B+ movement through the Cartesian coordinate system, make J5>-90°, align the robot's end with the tip of the calibration cone, and calibrate the sixth point

P7
On the basis of the first point, perform B- movement through the Cartesian coordinate system, make J5>-90°, align the robot's end with the tip of the calibration cone, and calibrate the seventh point

P8
On the basis of the seventh point, perform A+ movement through the Cartesian coordinate system, rotate by 90°and make J5>-90°, align the robot's end with the tip of the calibration cone, and calibrate the eighth point
P9
On the basis of the seventh point, perform A- movement through the Cartesian coordinate system, rotate by 90°and make J5>-90°, align the robot's end with the tip of the calibration cone, and calibrate the ninth point

P10
The robot returns to the first point, jog axis 5 through the joint coordinate system to make axis 5 up and J5<-90°, align the robot's end with the tip of the calibration cone, and calibrate the tenth point
P11
On the basis of the tenth point, perform A+ movement through the Cartesian coordinate system, rotate by 90°and make J5<-90°, align the robot's end with the tip of the calibration cone, and calibrate the eleventh point

P12
On the basis of the tenth point, perform A- movement through the Cartesian coordinate system, rotate by 90°and make J5<-90°, align the robot's end with the tip of the calibration cone, and calibrate the twelfth point

P13
The robot returns to the zero position, adjust the robot attitude so that the end tool tip of the robot is facing downwards, align the robot's end with the tip of the calibration cone, and calibrate the thirteenth point

P14
On the basis of the thirteenth point, perform X- movement through the Cartesian coordinate system, move the robot by a distance, click directly to calibrate the fourteenth point
P15
On the basis of the fourteenth point, perform Y+ movement through the Cartesian coordinate system, move the robot by a distance, and click directly to calibrate the fifteenth point