Calibration Series_20-Point Calibration
2022-05-23
12-point/15-point/20-point calibration share the same calibration interface, and calibrating all 20 points means using the 20-point calibration method.
This calibration method has the function of correcting the zero point, and it is not recommended to use a welding gun with radians for calibration.
Click the "20-point calibration" button at the bottom of the "Tool hand calibration" interface to enter the "20-point calibration" interface, as shown in the figure.
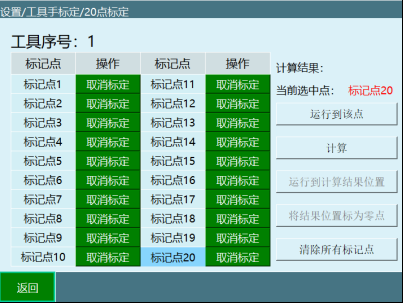
The specific calibration steps are as follows:
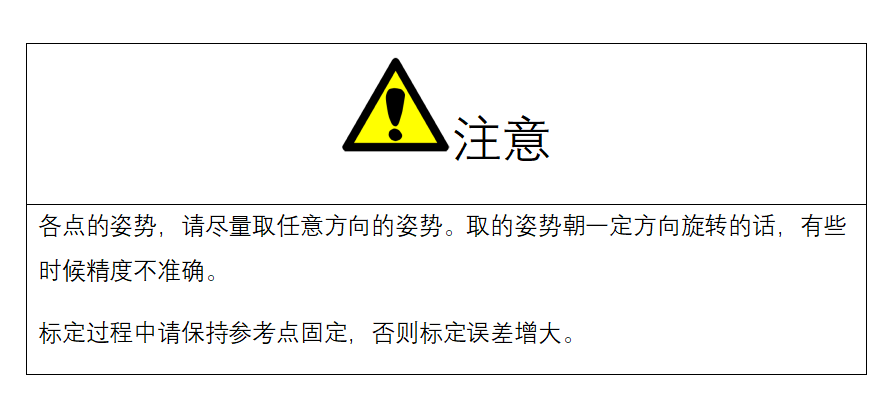
- Find a reference point (the tip of the pen is the reference point) and ensure that this reference point is fixed.
- Start inserting position points, click "Mark this point" after inserting each point, insert 20 points, and the greater the pose difference of each point, the better.
Manufacturers recommended calibration steps: P1: tool hand vertical down; P2: do A+; P3: do A+; P4: do A+; P5: do A-; P6: do A-; P7: do A-; P8: do B+; P9: do B+; P10: do B+; P11: do B-; P12: do B-; P13: do B-, the rest points are mainly calibrated by moving the robot around C axis to make a metre-shaped arrangement.
The specific steps are as follows.
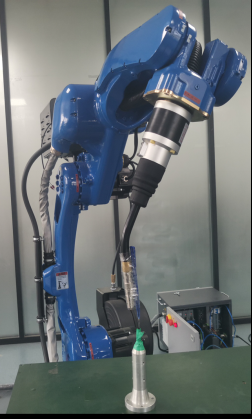
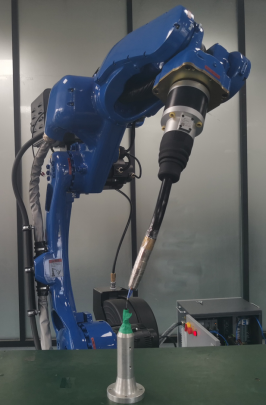
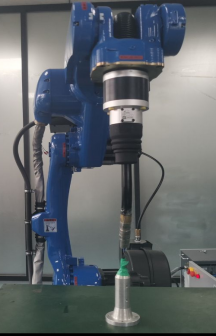
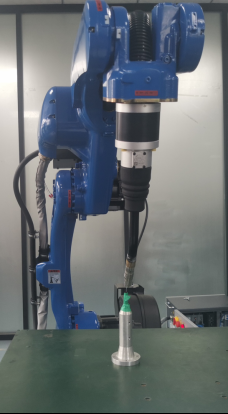
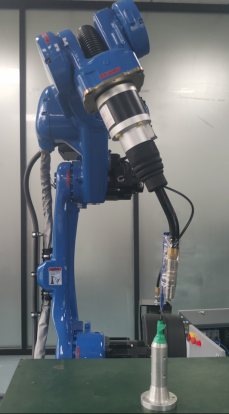
P1
Make the robot tool hand end perpendicular to the reference point

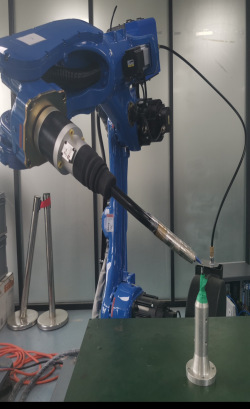
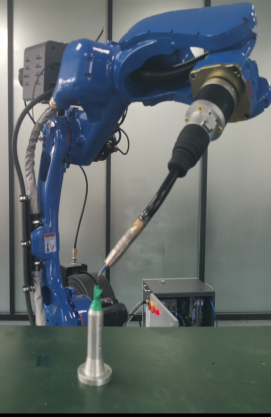
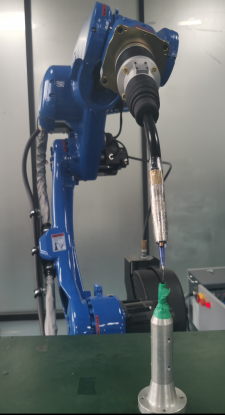
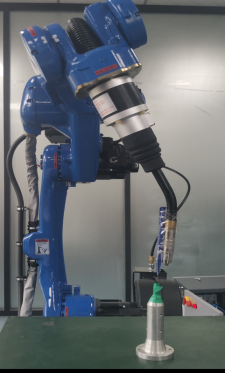
P2
Do A+ on the basis of the first point

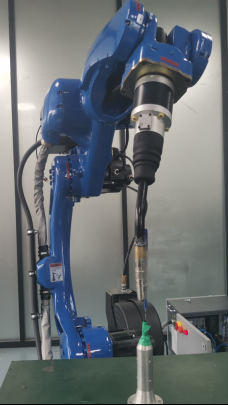
P3
Do A+ on the basis of the first point, rotate 40°

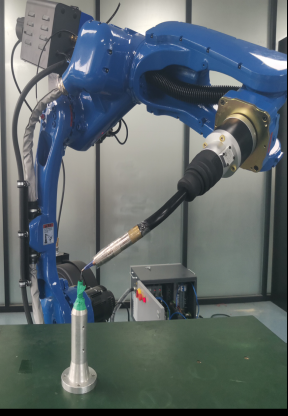
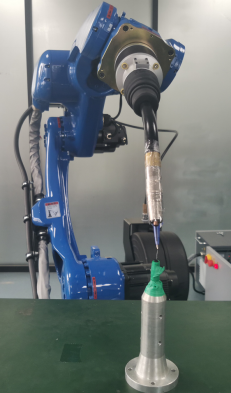
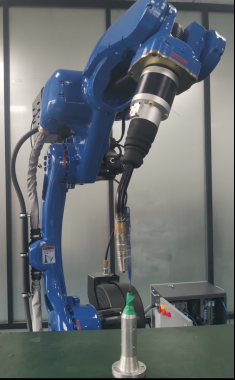
P4
Do A+ on the basis of the first point, rotate 60°
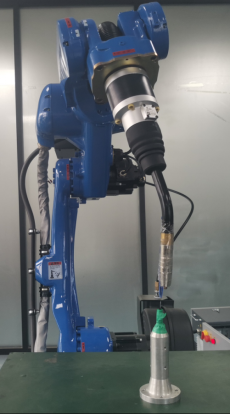
P5
Do A- on the basis of the first point, rotate 20°
P6
Do A- on the basis of the first point, rotate 40°
P7
Do A- on the basis of the first point, rotate 60°
P8
Do B+ on the basis of the first point, rotate 20°

P9
Do B+ on the basis of the first point, rotate 30°
P10
Do B+ on the basis of the first point, rotate 40°
P11
Do B- on the basis of the first point, rotate 20°

P12
Do B- on the basis of the first point, rotate 30°
P13
Do B- on the basis of the first point, rotate 40°
P14
Do C+ on the basis of the first point, rotate 30°
P15
Do C+ on the basis of the first point, rotate 50°

P16
Do C+ on the basis of the first point, rotate 70°
P17
Do C+ on the basis of the first point, rotate 90°
P18
Do C- on the basis of the first point, rotate 30°
P19
Do C- on the basis of the first point, rotate 60°
P20
Do C- on the basis of the first point, rotate 90°