iNexBot secondary development now supports the ROS ecosystem!
iNexBot secondary development now supports the ROS ecosystem!
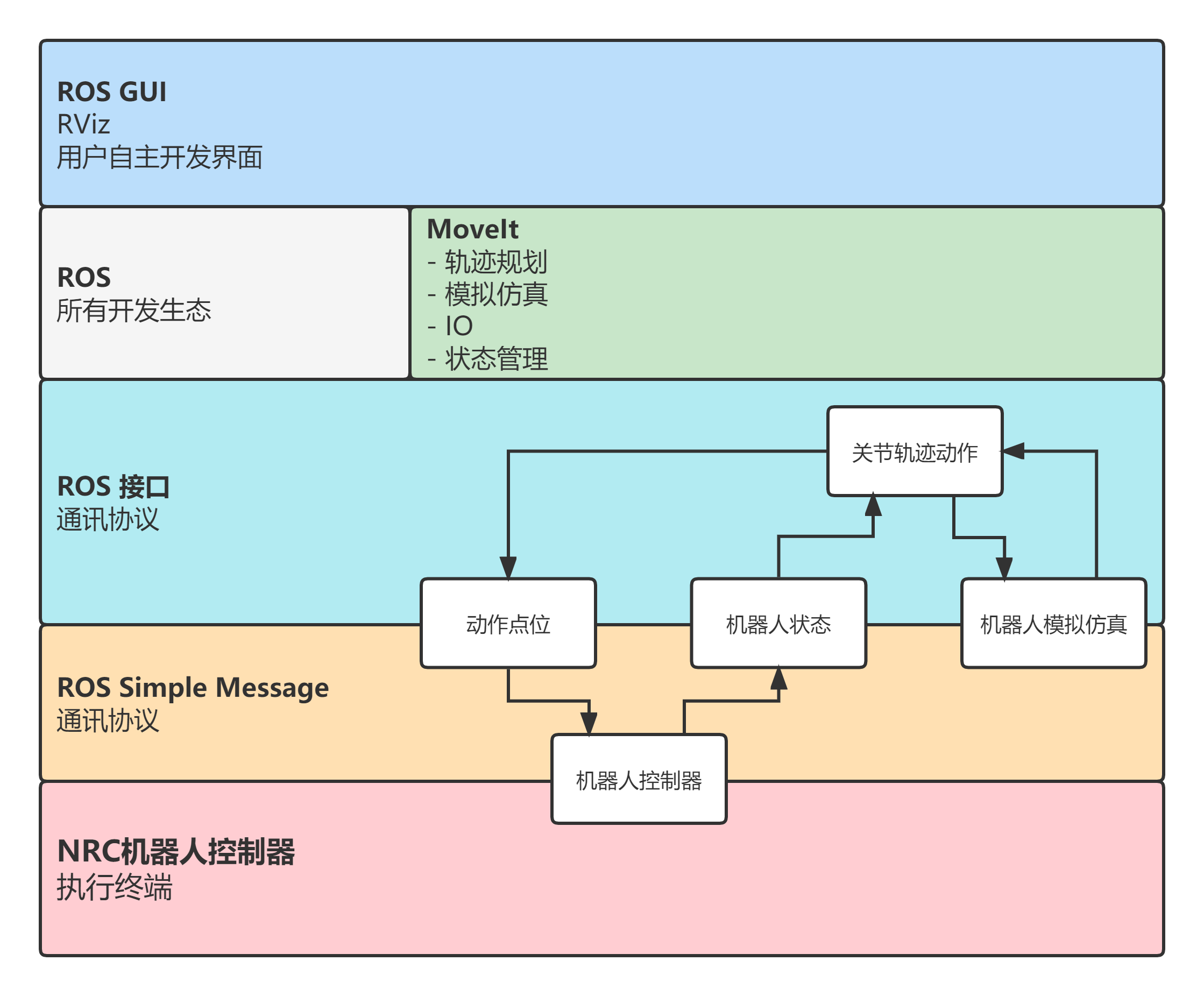
iNexBot's ROS package supports MoveIt trajectory planning, RViz visualization tool, and Gazebo virtual simulation platform. It has fully implemented the MoveIt standard protocol, Simple Message, and seamlessly integrated into the ROS ecosystem.
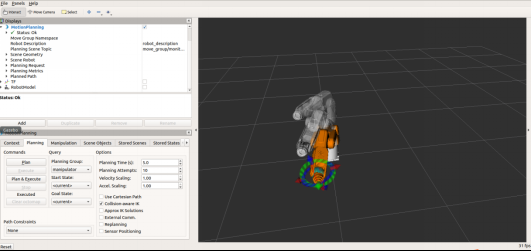
Using RViz, you can perform trajectory planning with MoveIt using virtual robots without the need for physical robots and visualize the simulated actions in real-time. You can also connect the NRC collaborative robot controller to both RViz and the physical robot, remotely control the robot's operation using RViz, and view real-time trajectory actions in the software. The robot's trajectory points, motor torque, current, and other data can be uploaded to the cloud in real-time, enabling cloud-based digital twinning.
Using Gazebo, we can create models of the entire production line and combine it with RViz for visual and sensor simulation. Additionally, we can utilize MoveIt for trajectory and IO planning. Once the simulation confirms that the desired objectives can be achieved, MoveIt can be connected to the NRC controller to send motion data without the need for manual teaching.