
R4C EtherCAT IO
Product Introduction
R4C——Multifunctional and customizable
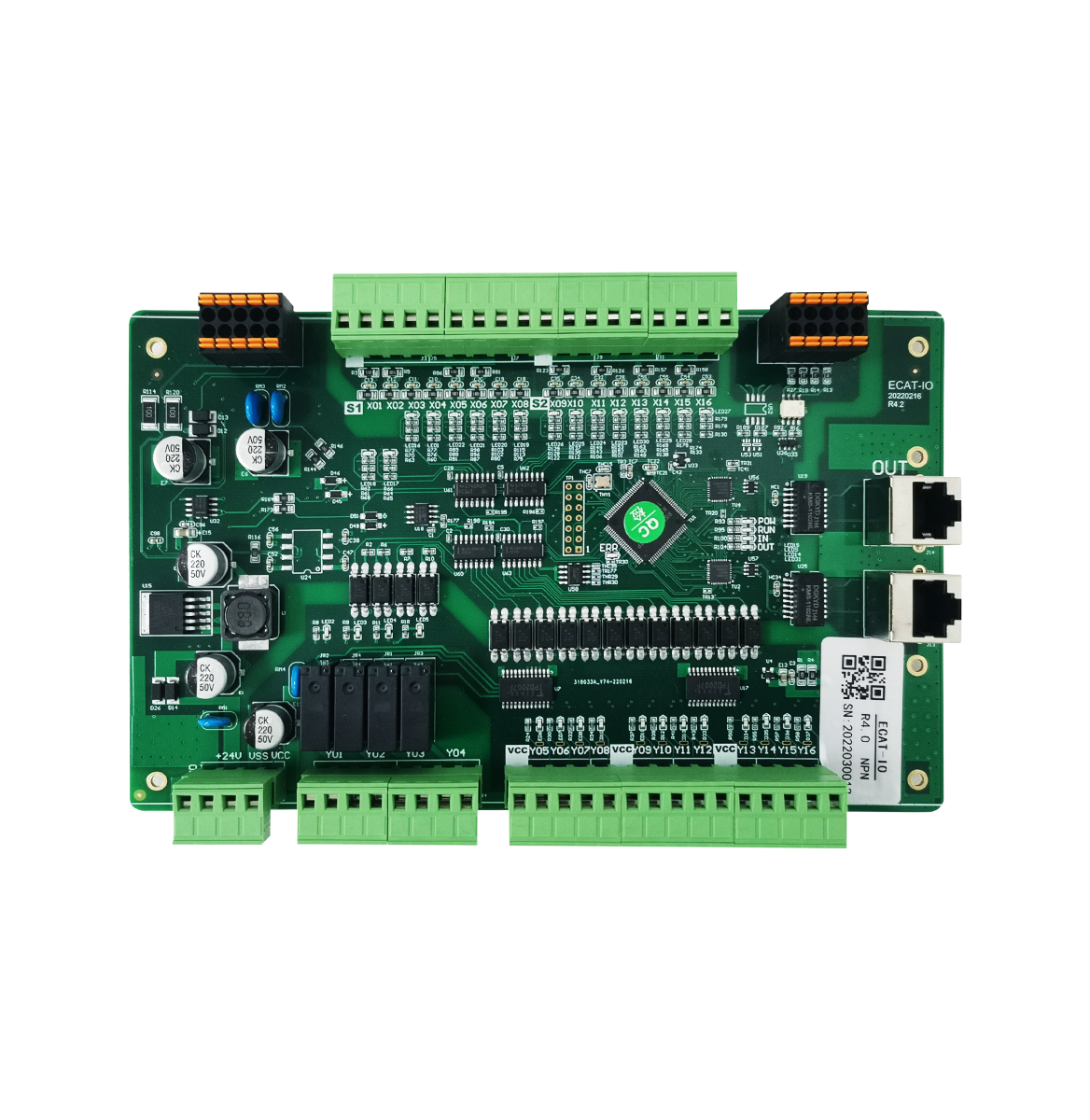
As iNexBot's new generation multifunctional EtherCAT IO, R4C covers most of the external interfaces required by the user, including 16 In/16 Out digital signal interface, 2 In/2 Out analog signal interface, and retains two customizable function expansion interfaces that can be used as CAN&485 and encoder signal interfaces, eliminating the need for additional modules and saving the customer costs. It can be expanded with other EtherCAT modules to meet customization requirements.
Product Parameters
| Item | Parameters |
|---|---|
| Size | 122*200mm |
| Bus speed | 100Mbps |
| Distributed clocks | supported |
| Power supply | 24V DC |
| Digital input | 16 in, polarity configurable |
| Digital output | 16 out (4-channel relay, 8-channel MOS tube) |
| Analog input | 2-channel, 0~10V |
| Analog output | 2-channel, 0~10V |
| Encoder | A/B phase counting (differential signal interface) |
| Expansion interface | Reserved for CAN&485 |
| Operating temperature | 0~60°C |
| Relative humidity | 95%, non-condensing |
| Communication cycle | minimum 200us |
Product Advantages
Multifunctional
It is integrated with digital IO and analog IO, eliminating the cost of purchasing additional analog IO. The digital outputs include 4-channel relay output and 8-channel MOS tube output, which can be selected and used according to requirements.
Customizable
It comes with two customizable interfaces, which can be used as encoder signal interface and CAN&485 signal interface. There is no need to purchase additional signal modules, saving factory deployment costs.
Scalable
You can expand with other EtherCAT modules as needed. If the existing IO interfaces are not sufficient, you can further expand with R4 or R2 IO modules. When combined with the NRC control system, it can be expanded up to 4 IO modules, which meets the majority of the factory's requirements.
Reliable quality
Made with selected high-quality electronic components and tested for various parameters such as EMC, temperature and humidity, and electrostatic discharge (ESD), ensuring stable operation.